Dépannage du CANBUS¶
Ce document fournit des informations sur le dépannage des problèmes de communication lors de l'utilisation de Bus CAN avec Klipper.
Vérifier le câblage du bus CAN¶
La première étape pour résoudre les problèmes de communication est de vérifier le câblage du bus CAN.
Be sure there are exactly two 120 Ohm terminating resistors on the CAN bus. If the resistors are not properly installed then messages may not be able to be sent at all or the connection may have sporadic instability.
Les câbles CANH et CANL doivent être torsadés. Les torsades ne doivent pas être espacées de plus de quelques centimètres. Évitez de torsader les câbles CANH et CANL avec les fils de puissance et assurez-vous que les fils de puissance placés à côté du bus can n'aient pas le même nombre de torsades.
Vérifier que toutes les fiches et sertissages sur le câblage CAN sont entièrement sécurisés. Le mouvement de la tête d'outil d'imprimante peut faire bouger le câblage de bus CAN et provoquer des faux contacts - source d'erreurs de communication aléatoires.
Vérification de l'augmentation du compteur octets_invalide¶
Le fichier journal de Klipper affiche une ligne Stats une fois par seconde lorsque l'imprimante est active. Ces lignes "Stats" ont un compteur bytes_invalid pour chaque microcontrôleur. Ce compteur ne devrait pas augmenter au cours de l'utilisation normale de l'imprimante (il est normal que le compteur soit non nul après un RESTART et ce n'est pas une préoccupation si le compteur augmente une fois par mois). Si ce compteur augmente sur un microcontrôleur de bus CAN pendant un fonctionnement normal (s'il augmente toutes les heures ou plus fréquemment) alors c'est une indication d'un problème grave.
Incrementing bytes_invalid on a CAN bus connection is a symptom of reordered messages on the CAN bus. If seen, make sure to:
- Use a Linux kernel version 6.6.0 or later.
- If using a USB-to-CANBUS adapter running candlelight firmware, use v2.0 or later of candleLight_fw.
- If using Klipper's USB-to-CANBUS bridge mode, make sure the bridge node is flashed with Klipper v0.12.0 or later.
Reordered messages is a severe problem that must be fixed. It will result in unstable behavior and can lead to confusing errors at any part of a print. An incrementing bytes_invalid is not caused by wiring or similar hardware issues and can only be fixed by identifying and updating the faulty software.
Older versions of the Linux kernel had a bug in the gs_usb canbus driver code that could cause reordered canbus packets. The issue is thought to be fixed in Linux commit 24bc41b4 which was released in v6.6.0. In some cases, older Linux versions may not show the problem (due to how hardware interrupts are configured), however if problems are seen the recommended solution is to upgrade to a newer kernel.
Older versions of candlelight firmware could reorder canbus packets, and the issue is thought to be fixed in candlelight_fw commit 8b3a7b45.
Older versions of Klipper's USB-to-CANBUS bridge code could incorrectly drop canbus messages. This is not as severe as reordering messages, but it should still be fixed. It is thought to be fixed with Klipper PR #6175.
Use an appropriate txqueuelen setting¶
The Klipper code uses the Linux kernel to manage CAN bus traffic. By default, the kernel will only queue 10 CAN transmit packets. It is recommended to configure the can0 device with a txqueuelen 128 to increase that size.
If Klipper transmits a packet and Linux has filled all of its transmit queue space then Linux will drop that packet and messages like the following will appear in the Klipper log:
Got error -1 in can write: (105)No buffer space available
Klipper will automatically retransmit the lost messages as part of its normal application level message retransmit system. Thus, this log message is a warning and it does not indicate an unrecoverable error.
If a complete CAN bus failure occurs (such as a CAN wire break) then Linux will not be able to transmit any messages on the CAN bus and it is common to find the above message in the Klipper log. In this case, the log message is a symptom of a larger problem (the inability to transmit any messages) and is not directly related to Linux txqueuelen.
One may check the current queue size by running the Linux command ip link show can0. It should report a bunch of text including the snippet qlen 128. If one sees something like qlen 10 then it indicates the CAN device has not been properly configured.
It is not recommended to use a txqueuelen significantly larger than 128. A CAN bus running at a frequency of 1000000 will typically take around 120us to transmit a CAN packet. Thus a queue of 128 packets is likely to take around 15-20ms to drain. A substantially larger queue could cause excessive spikes in message round-trip-time which could lead to unrecoverable errors. Said another way, Klipper's application retransmit system is more robust if it does not have to wait for Linux to drain an excessively large queue of possibly stale data. This is analogous to the problem of bufferbloat on internet routers.
Under normal circumstances Klipper may utilize ~25 queue slots per MCU - typically only utilizing more slots during retransmits. (Specifically, the Klipper host may transmit up to 192 bytes to each Klipper MCU before receiving an acknowledgment from that MCU.) If a single CAN bus has 5 or more Klipper MCUs on it, then it might be necessary to increase the txqueuelen above the recommended value of 128. However, as above, care should be taken when selecting a new value to avoid excessive round-trip-time latency.
Use canbus_query.py only to identify nodes never previously seen¶
It is only valid to use the canbus_query.py tool to identify micro-controllers that have never been previously identified. Once all nodes on a bus are identified, record the resulting uuids in the printer.cfg, and avoid running the tool unnecessarily.
The tool is implemented using a low-level mechanism that can cause nodes to internally observe bus errors. These internal errors may result in communication interruptions and may result is some nodes disconnecting from the bus.
It is not valid to use the tool to "ping" if a node is connected. Do not run the tool during an active print.
Obtenir les journaux 'candump'¶
Les messages de bus CAN envoyés au microcontrôleur sont gérés par le noyau Linux. Il est possible de capturer ces messages à des fins de débogage. Le journal de ces messages peut être utile lors des diagnostics.
L'outil Linux can-utils fournit le logiciel de capture. Il peut être installé en exécutant :
sudo apt-get update && sudo apt-get install can-utils
Une fois installé, on peut obtenir une capture de tous les messages de bus CAN sur une interface avec la commande suivante :
candump -tz -Ddex can0,#FFFFFFFF > mycanlog
On peut lire le fichier journal résultant (mycanlog dans l'exemple ci-dessus) pour voir chaque message de bus CAN brut qui a été envoyé et reçu par Klipper. Comprendre le contenu de ces messages nécessite une connaissance de bas niveau de Klipper : Protocole CANBUS et Commandes MCU.
Analyser les messages Klipper dans un journal candump¶
Il est possible d'utiliser l'outil parsecandump.py pour analyser les messages microcontrôleur Klipper de bas niveau contenus dans un journal candump. L'utilisation de cet outil nécessite la connaissance de Klipper MCU commands. Par exemple :
./scripts/parsecandump.py mycanlog 108 ./out/klipper.dict
This tool produces output similar to the parsedump tool. See the documentation for that tool for information on generating the Klipper micro-controller data dictionary.
In the above example, 108 is the CAN bus
id. It is a hexadecimal number. The id 108 is assigned by Klipper to the first micro-controller. If the CAN bus has multiple micro-controllers on it, then the second micro-controller would be 10a, the third would be 10c, and so on.
Le journal candump doit être généré avec les arguments de ligne de commande -tz -Ddex (par exemple : candump -tz -Ddex can0,#FFFFFF)) Afin de pouvoir être utilisé avec l'outil parsecandump.py.
Utiliser un analyseur logique sur le câblage canbus¶
Le logiciel Sigrok Pulseview associé à un analyseur logique à bas coût logic analysisr peut être utile pour le diagnostic de signal de bus CAN. C'est un sujet avancé qui n'intéressera probablement que les experts.
On peut trouver des « analyseurs logiques USB » pour moins de 15 $ (prix américain de 2023). Ces appareils sont souvent nommés « Saleae logic clone » ou « analyseur logique USB 24MHz 8 canaux ».
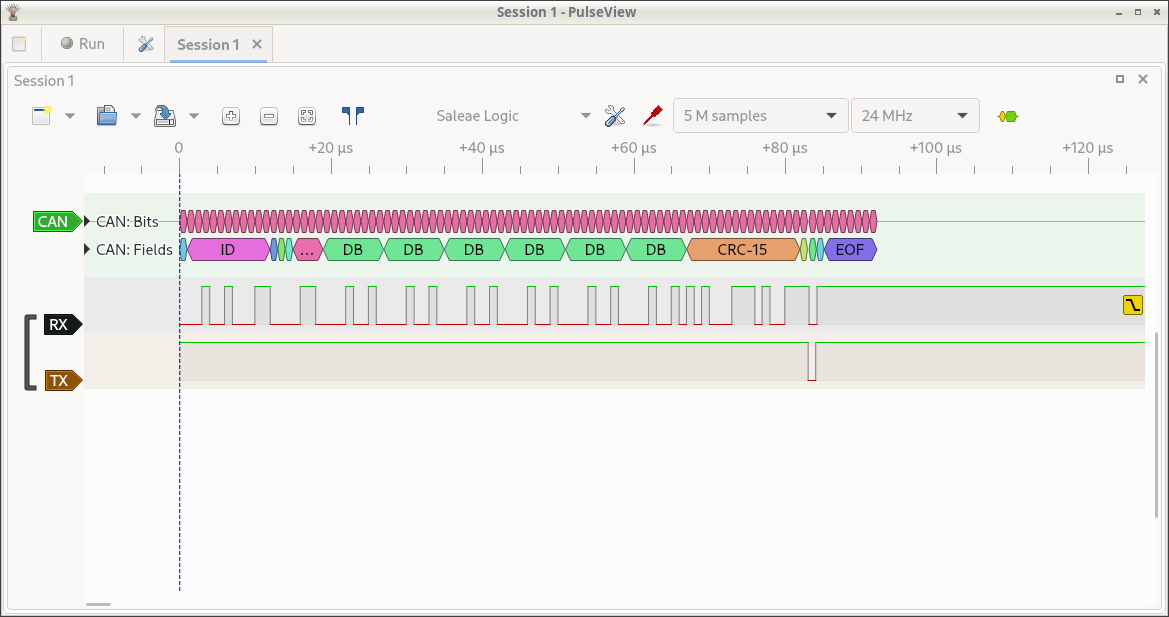
L'image ci-dessus a été prise en utilisant Pulseview avec un analyseur logique "Saleae clone". Le logiciel Sigrok et Pulseview ont été installés sur une machine de bureau (il faudra aussi installe le microligiciel "fx2lafw" si il est fourni séparément). La broche CH0 sur l'analyseur logique doit être connectée à la ligne CAN Rx, la broche CH1 à la ligne CAN Tx, GND doit être connecté avec GND. Pulseview doit être configuré pour n'afficher que les lignes D0 et D1 (icône rouge 'probe' au centre de la barre d'outils). Le nombre d'échantillons a été fixé à 5 millions (barre d'outils) et le taux d'échantillonnage à 24Mhz (barre d'outils). Le décodeur CAN a été ajouté (icône bulle jaune et verte sir la barre d'outils en haut à droite). Le canal D0 étiqueté comme RX et défini pour être déclenché sur un front descendant (cliquez sur l'étiquette D0 noire à gauche). Le canal D1 a été étiqueté comme TX (cliquez sur l'étiquette D1 brune à gauche). Le décodeur CAN a été configuré à une vitesse de 1Mbit (cliquez sur l'étiquette CAN verte à gauche). Le décodeur CAN a été déplacé en haut de l'écran (cliquez et faites glisser l'étiquette CAN verte). Enfin, la capture a été commencée (cliquez sur "Run" en haut à gauche) et un paquet a été transmis sur le bus CAN (cansend cans0 123#121212121212).
L'analyseur logique fournit un outil indépendant pour capturer les paquets et vérifier la chronologie.